MITACS GRI at Robotics, Mechatronics, and Automation Laboratory (RMAL), TMU Since May 2022 Supervisor: Prof. Farrokh Janabi-Sharifi
Table of Contents
Background
In this research project, a reinforcement learning methodology is presented for control of soft robots modelled using SOFA.
Difference Reinforcement Learning algorithms are implemented using PyTorch library. The RL algorithms was then tested on three robots - (1) MultiGate Robot, (2) Soft Trunk and (3) Soft Gripper.
Modeling using SOFA
Soft Robots were modeled using software known as SOFA (Simulation Open Framework Architecture).
SOFA has a flexible architecture and a wide catalog of plugins to facilitate efficient and accurate simulations. The 'SoftRobots' plugin was used to model the behavior and control of soft robots in SOFA.
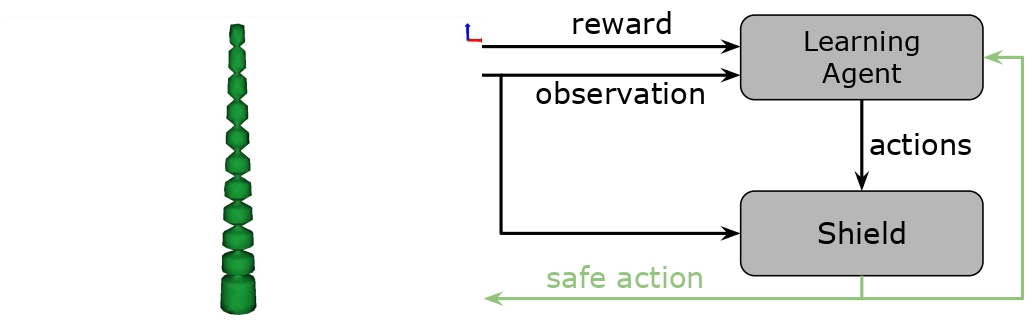
 Model of a soft trunk in SOFA Simulation Software
Model of a soft trunk in SOFA Simulation Software
