Introduction
Hi! I am Shaswat Garg, a first year MASc student from University of Waterloo, Canada currently pursuing a major in Mechanical and Mechatronics Engineering with specialization in Robotics. I am broadly interested in robotics, particularly Aerial Robots, Reinforcement Learning, Motion Planning, Deep Learning and Evolutionary Computation Algorithms.
“The best way to predict the future is to create it” from Educator Peter Drucker is my life motto, which inspires me to explore the interdisciplinary realm of robots, reinforcement learning and motion planning through industrial internship and research exploration. My enthusiasm for Robotics stems from my fascination of living in a world where machines can also move and think as well as human beings.
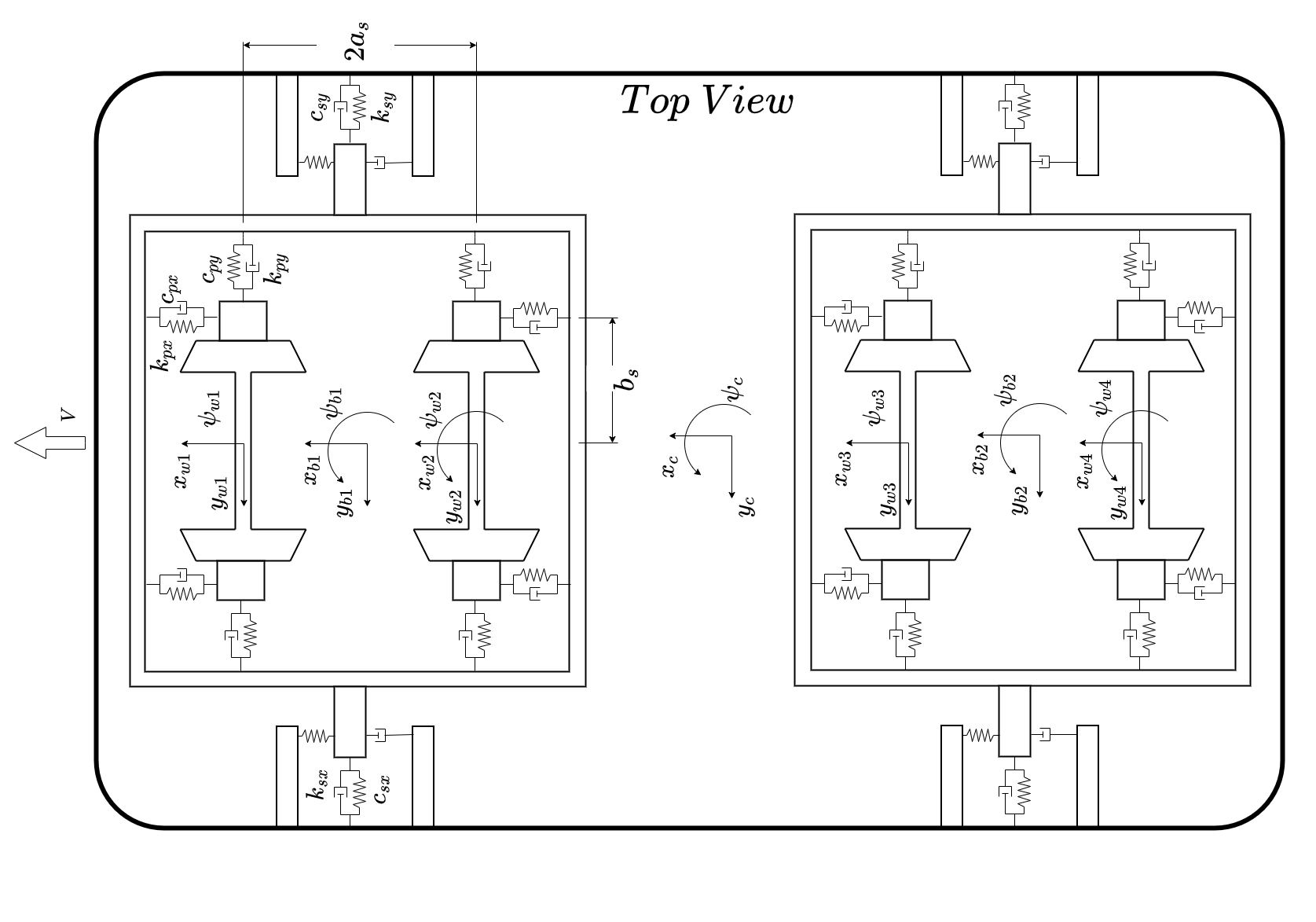
I had the opportunity to work as a MITACS Globalink Research Intern, at Robotics, Mechatronics, and Automation Laboratory (RMAL), Toronto Metropolitan University (TMU) on using Deep learning for Kinematics and Control of single section tendon driven continuum robots under the supervision of Prof. Farrokh Janabi-Sharifi . Previously, I worked as a research intern at Mechatronics Laboratory, IIT Delhi on dynamic analysis of hunting stability of railway vehicles on knife edge rails and conical wheels under the supervision of Prof. S.K. Saha and Prof. S.P. Singh . In my sophmore year, I interned at HyperX Energy (IIT Delhi Incubated startup) as a Chassis Engineer, wherein I was tasked with design and analysis of a lighweight and durable trellis frame for the Prototype II.
My current research interests are mostly focused on incorporating cutting-edge deep learning approaches like reinforcement learning into autonomous control for robots. In addition, I am collaborating closely with Prof. Brokoslaw Laschowski from UofT on development of reinforcement learning algorithms for control of musculoskeletal systems.
For more info, please refer to the latest CV here.